歌的AI实验室的一组研究人员正在努力开发四足的像狗一样的机器人,该机器人通过研究真正的狗如何运动来学习狗的行为,从而看到了成果。该小组已在Google AI博客上发布了他们正在做的工作的大纲。
通过模仿生物的动作来训练机器人执行任务并不是什么新鲜事,例如,建造汽车的机器人手臂被教导如何模仿人类手臂的期望动作来点焊或拧紧螺栓中国机械网okmao.com。但是通过向机器人展示真实的狗的视频来教机器人绝对是新的。这就是Google所做的。在这种情况下,该机器人是一个名为Laikago的四足机器人(紧随Laika之后,它是太空中的第一只狗)—通过向机器人展示真实狗的运动捕捉画面,训练它像真实狗一样走路,奔跑,甚至追尾行动。
实际上,视频实际上首先是由AI系统处理的,该系统会将视频中的动作转换为Laikago的动画版本。为了找出可能的解释错误(因为数字狗是由金属,电线和马达而不是骨头,肌肉和肌腱制成的),该团队向AI系统显示了一只真实狗在行动的多个定格视频。AI系统根据现实世界中可能遇到的场景,建立可能动作的工具集。一旦模拟建立了知识库,就将其“大脑”上载到Laikago,然后Laikago将模拟中学到的知识用作自身行为的起点。
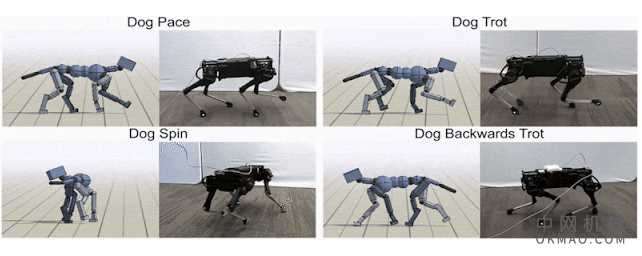
运行中的Laikago视频显示,该技术行之有效-机器狗能够像真正的狗一样走路和小跑-甚至模拟了追逐它的尾巴的过程。但是,与其他先进的机器人动物(例如,来自Boston Dynamics的那些动物)相比,它也有一些不足之处,这些动物通过编程获得了技能,例如,绊脚或绊倒之后重新站起来仍然很麻烦。但是Google的研究人员并不畏惧,他们相信更多的研究将使他们的机器人带来越来越逼真的行为。

