继一周前在《Nat Commun》中对带电纳米片(NS)/聚N-异丙基丙烯酰胺(PNIPAAm)水凝胶的制备工艺进行升级,得到了能在地面自由空间中任意爬行的软体机器人后(浙大吴子良/南科大洪伟《自然·通讯》:让水凝胶软体机器人在开放空间全向爬行),浙江大学郑强教授课题组的吴子良研究员联合德国拜罗伊特大学Josef Breu课题组对NS/PNIPAAm水凝胶的制备工艺又进行了大升级。
在本工作中,研究人员在未固化的NS/PNIPAAm水凝胶中插入了各种形状的电极(点、圆环、三角形环等),这些电极的数量和位置都可以调节,进而激发出多种不同分布的交变电场。在交变电场的取向作用下,表面带有大量电荷的NS会沿着电场方向形成取向结构中国机械网okmao.com。通过调节电极的形状和分布,就能够对水凝胶中的NS的取向结构进行编程。因而通过这种方法制备的水凝胶可以具有十分精巧的可逆受激形变。相比于之前所使用的平行板电极取向-掩膜辅助光固化指定区域的方法,分布式电场法在保证水凝胶中的NS取向的区域可定制性的基础上具有更高的制备效率。上述成果以“Distributed Electric Field Induces Orientations of Nanosheets to Prepare Hydrogels with Elaborate Ordered Structures and Programmed Deformations”为题发表于Advanced Materials。
1. 通过点电极制备取向NS/AuNP/PNIPAAm水凝胶

图 1 通过分布式电场在PNIPAAm水凝胶中的制备NS取向结构
在水中表面带有高密度电荷的NS会因静电相互排斥而均匀分散,在很低的浓度(~0.3 wt%)下也会形成向列相液晶。这种均匀分散的状态并不会因为加入NIPAAm单体及引发剂而改变。在此基础之上,将电极插入上述溶液中,并施加场强为4 V/mm,频率为10 kHz的电场约60 min,即可使NS按照电场方向排列。通过光引发NIPAAm聚合便可形成NS/PNIPAAm水凝胶。若要赋予水凝胶光响应特性,只需要在上述体系中再引入金纳米颗粒(AuNP)即可。
2. NS/AuNP/PNIPAAm水凝胶的力学及响应特性
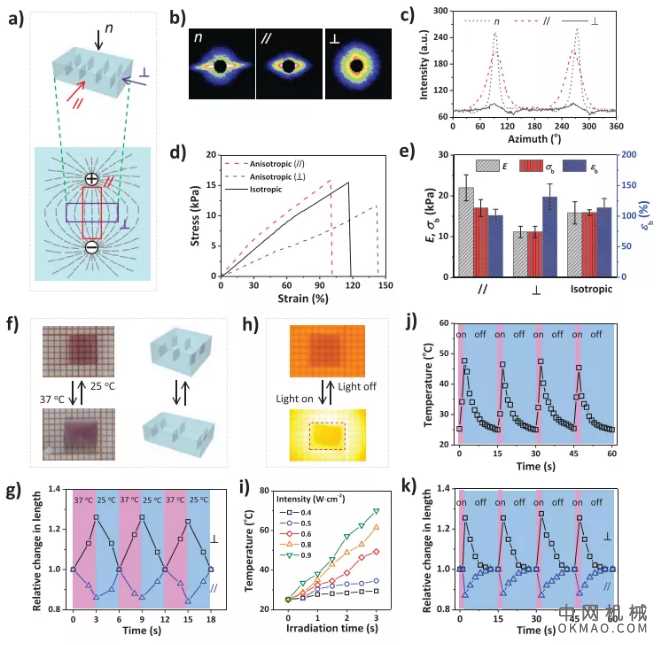
图 2 NS/AuNP/PNIPAAm水凝胶的力学各向异性
通过SAXS研究人员确定了水凝胶具有沿电场方向排列的各向异性。这一各向异性对水凝胶的力学性能产生了较大影响。具体来说,在平行于NS排列的方向上水凝胶具有更高的模量和强度(图2d、e)。
PNIPAAm的LCST为32 ℃,当温度达到37 ℃时,PNIPAAm脱水,使得NS间介质的介电常数升高,NS间的相互排斥力增大,水凝胶伸长;当温度降回25 ℃时,游离水减少,水凝胶就回到初始状态。AuNP对520 nm的光具有很强的光热效应,引入AuNP就可以让水凝胶具有光响应的特性,上述特性在多次循环中具有良好的稳定性(图2f-k)。
3. 通过多形状和分布的电极制备具有可编程形状响应性水凝胶
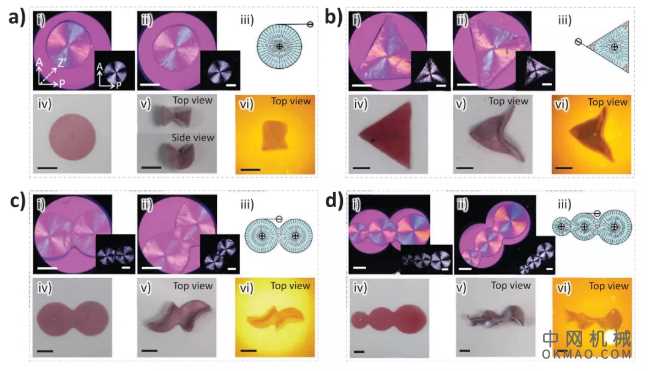
图 3 不同形状电极制备的各向异性NS/AuNP/PNIPAAm水凝胶及其响应行为
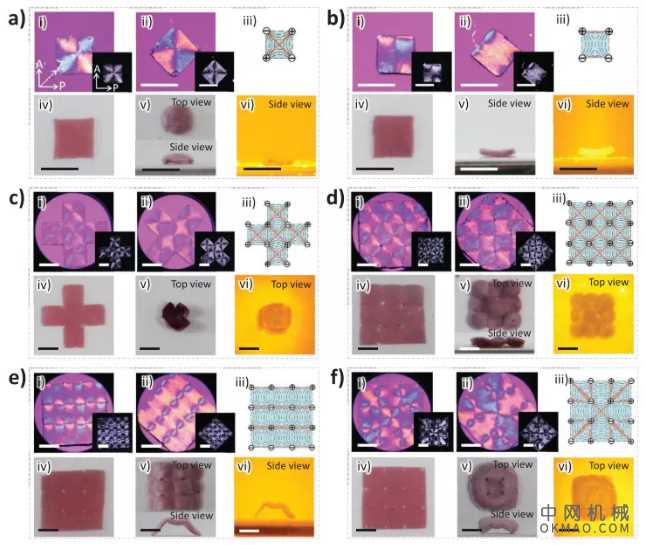
图 4 阵列式点电极制备的各向异性NS/AuNP/PNIPAAm水凝胶及其响应行为
通过改变电极的形状和位置,就能够在水凝胶中创造具有不同分布的电场。利用这一特性,我们就能够提前给水凝胶的形状记忆行为进行“编程”。由于平行和垂直于NS排列方向的水凝胶具有不同的模量,因而在用光或热激活其形状记忆行为时,就会产生内应力,使其变形为指定的形状。
4. 基于可编程形状响应性水凝胶的软体机器人
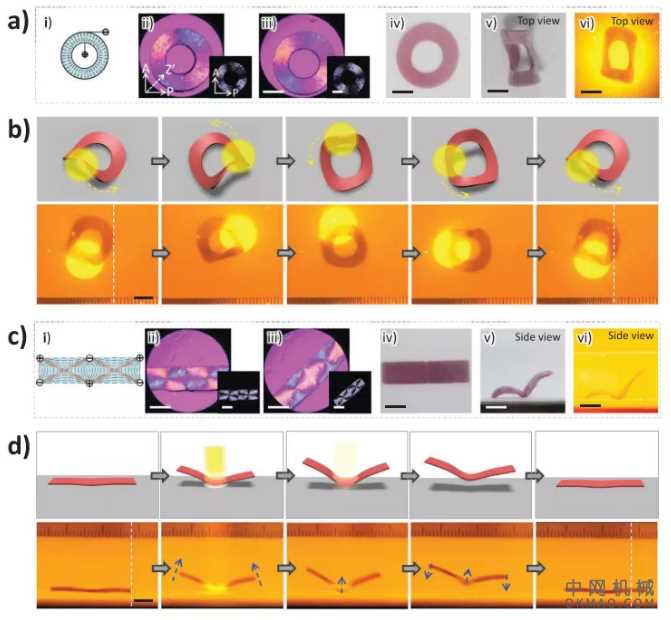
图 5 NS/AuNP/PNIPAAm软体机器人的可编程爬行和弹跳行为
分布式电场取向法最大的优势就在于可以制备传统的平行板电极取向不能制备的形状。作为展示,研究人员分别制备了圆环状和弹跳型水凝胶软体机器人(图5a、c)。
在圆环状水凝胶软体机器人中,NS沿圆环半径方向取向,当受到全局刺激的时候,会形成鞍状结构。如果让光电沿圆环扫描,形变就会在圆环上成波浪状移动,进而带动圆环的运动(图5b)。
如果让NS在水凝胶中按图5c)i的方式排列,水凝胶中部就会产生内应力,如果给予该部位瞬时光照,水凝胶就会在中部折叠并积蓄能量,在光照消失后,水凝胶两翼下落,中部快速弹起,以弹跳的方式带动机器人运动(图5d)。
总结
通过分布式电极取向NS的方式给予了NS/AuNP/PNIPAAm水凝胶制备更大的自由度,进而实现了水凝胶的可编程形变。可以预见,上述策略具有较好的普适性,可以用在以其它弹性体和水凝胶为基材的软体机器人制备中,取向排列的材料也不仅限于NS,纳米棒或其它各向异性结构也同样适用。因而这种方法在生物医疗器械等领域具有广泛的的应用前景。

